


[ Cours 3 ] Schémas cinématiques, commande du moteur et timer
Bonjour,
C'est la troisième semaine de TPE. On a commencé à réaliser la conception sous SolidWorks® et le schéma cinématique d'une pince à trois doigts...
Sous SolidWorks nous avons le bâti, les roues, et les vis fournis par le professeur. La pince à trois doigts a été complètement terminée et nous avons commencé à réaliser le schéma cinématique pour l'autre pince ainsi que sa réalisation.
Schéma cinématique de la pince droite
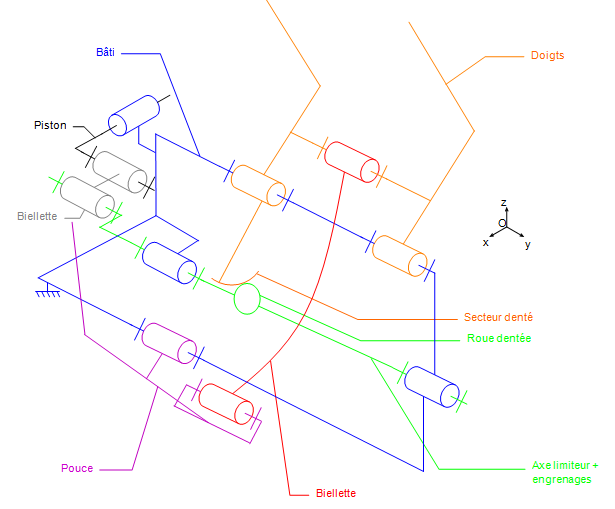
Schéma cinématique de la pince gauche

Le bâti

En Génie Électronique, nous étudions aussi la commande du moteur afin de bien comprendre comment celle-ci s'effectue et le rôle des signaux sensd et vitd. Nous nous intéressons au Timer, un compteur programmable qui peut nous servir pour gérer des événements à des durées précises dans un programme, sur lequel nous avons quelques questions... Comme d'habitude, voilà nos réponses! : TP2_Robot_suiveur_de_lignes
Cependant, nous songeons déjà à inclure des bandes noires horizontales sur notre circuit afin de marquer les arrêts du robot...
Merci,



![[ Oral Blanc ] Quelques erreurs à corriger](https://image.canalblog.com/MWwOngJgJdjMrgFUJgJeqqbl1wE=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
![[ Etude ] Diagramme FAST](https://image.canalblog.com/nVXc9iq75rQfRJNdC5WC5ZuR0kw=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F24%2F11%2F809687%2F61854574_o.png)